Zanim przystąpimy do łączenia ESP32 z czujnikiem PIR musimy wiedzieć jak działają przerwania oraz jak je odczytywać i obsługiwać w ESP32. Omówmy szczegółowo działanie PIR z ESP32.
Oto treść tego artykułu:
2: Wywoływanie przerwania w ESP32 – MicroPython
3: Połączenie czujnika PIR z ESP32 – MicroPython
3.1: Czujnik ruchu PIR (HC-SR501)
1: Czym są przerwania
Większość zdarzeń zachodzących w programowaniu ESP32 odbywa się sekwencyjnie, co oznacza wykonywanie kodu linia po linii. Aby obsługiwać i kontrolować zdarzenia, które nie muszą być uruchamiane podczas sekwencyjnego wykonywania kodu Przerywa są używane.
Na przykład, jeśli chcemy wykonać określone zadanie, gdy wystąpi jakieś specjalne zdarzenie lub podany zostanie sygnał wyzwalający na piny cyfrowe mikrokontrolera, używamy przerwania.
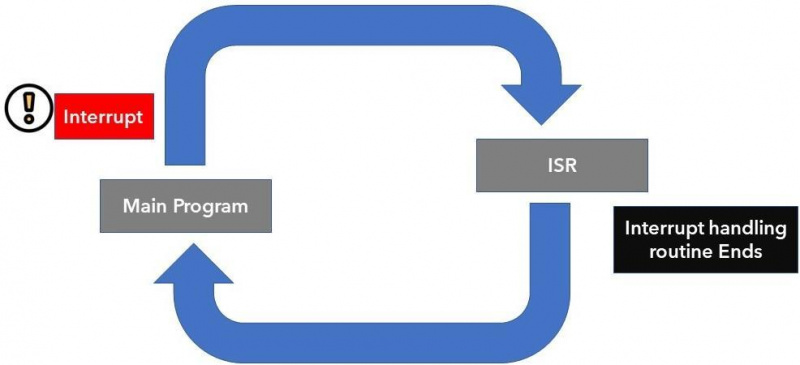
W przypadku przerwy nie musimy stale sprawdzać stanu cyfrowego pinu wejściowego ESP32. Kiedy pojawia się przerwanie, procesor zatrzymuje program główny i wywoływana jest nowa funkcja, znana jako ISR ( Przerwij procedurę obsługi ). Ten ISR funkcja obsługuje przerwanie wywołane po tym powrocie do programu głównego i rozpoczęciu jego wykonywania. Jednym z przykładów ISR jest czujnik ruchu PIR, który generuje przerwanie po wykryciu ruchu.
1.1: Piny przerwań w ESP32
Przerwanie zewnętrzne lub sprzętowe może być spowodowane przez dowolny moduł sprzętowy, taki jak czujnik dotykowy lub przycisk. Przerwania dotykowe mają miejsce, gdy dotyk zostanie wykryty na pinach ESP32 lub przerwanie GPIO może być również użyte po naciśnięciu klawisza lub przycisku.
W tym artykule uruchomimy przerwanie po wykryciu ruchu za pomocą czujnika PIR z ESP32.
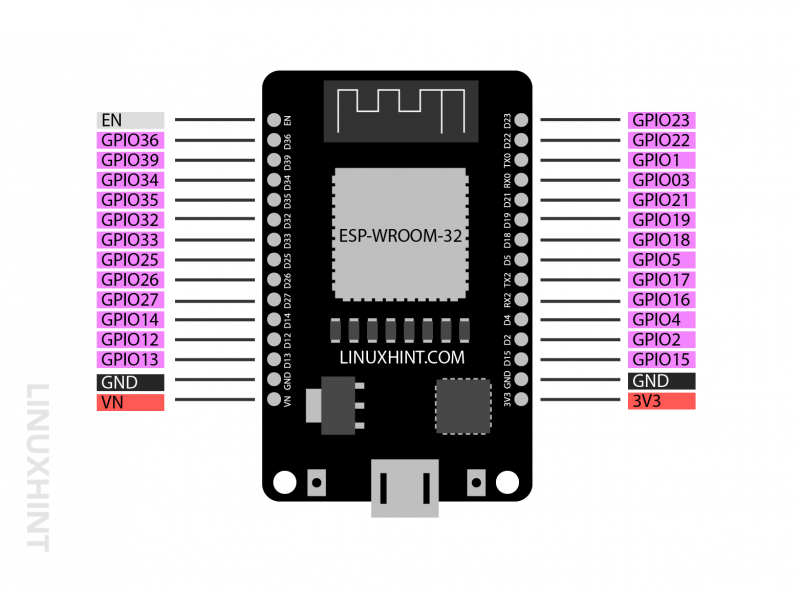
Prawie wszystkie piny GPIO z wyjątkiem 6 zintegrowanych pinów SPI, które zwykle wchodzą w skład zestawu 36 wersja pinowa płytki ESP32 nie może być używana do wywoływania przerwań. Tak więc, aby otrzymać zewnętrzne przerwanie, oto piny, których można użyć w ESP32:
2: Wywoływanie przerwania w ESP32 za pomocą MicroPython
Aby zaprogramować płytkę ESP32 z czujnikiem PIR za pomocą kodu MicroPython. Musimy zdefiniować funkcję przerwania. Poniżej przedstawiono kilka prostych kroków, które pomagają w zdefiniowaniu przerwania dla płyty ESP32.
Krok 1: Zainicjuj funkcję obsługi przerwań: Funkcja obsługi przerwań powinna być zdefiniowana w prosty sposób, aby mogła się szybko wykonać i jak najszybciej powrócić do programu głównego. Można to zrobić, definiując zmienną globalną, aby można było uzyskać do niej dostęp w dowolnym miejscu w kodzie, jeśli zostanie wywołana.
Tutaj w przypadku czujnika PIR użyjemy pinu GPIO jako a światowy zmienny. Funkcja przerwania przyjmie pin jako argument i opisze pin GPIO, który powoduje wystąpienie funkcji przerwania.
zdecydowanie handle_interrupt ( szpilka ) :Krok 2: Skonfiguruj pin GPIO dla przerwania: Aby uzyskać wartość pinu GPIO, musimy utworzyć obiekt, który będzie pobierał z niego dane wejściowe za pomocą Pin.IN jako drugi argument wewnątrz naszej klasy pin. Możemy zmienić tę nazwę na dowolną inną.
szpilka = Szpilka ( 13 , Szpilka. W )Krok 3: Podłącz przerwanie do pinu GPIO dla czujnika PIR metodą irq():
Za pomocą poniższego polecenia możemy ustawić przerwanie na pin, który zdefiniowaliśmy wcześniej.
most. Irq ( cyngiel = Szpilka. IRQ_RISING , treser = uchwyt_przerwanie )The przerwanie () Metoda służy do dołączania przerwania do pinu. przerwanie () akceptuje dwa różne argumenty:
- Cyngiel
- Treser
cyngiel: Ten argument wyjaśnia tryb wyzwalania. Poniżej przedstawiono trzy tryby:
- Pin.IRQ_FALLING: Kiedy pin przechodzi z WYSOKIEGO na NISKI, uruchamiane jest przerwanie.
- Pin.IRQ_RISING: Po przejściu pinu z LOW na HIGH, uruchamiane jest przerwanie.
- Pin.IRQ_FALLING|Pin.IRQ_RISING: Wywołaj przerwanie za każdym razem, gdy pin zmieni swój stan. Albo pin przechodzi w stan WYSOKI lub NISKI.
treser: Ta funkcja zostanie wywołana po wyzwoleniu przerwania.
3: Połączenie czujnika PIR z ESP32
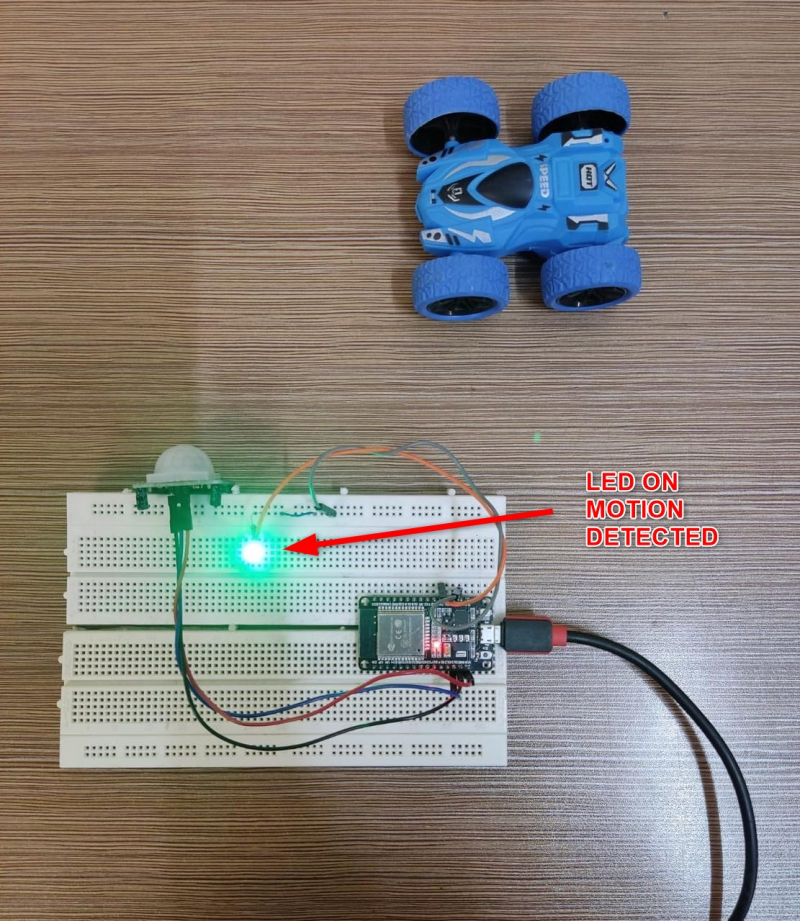
Jak już omówiliśmy koncepcje przerwań z ESP32 przy użyciu MicroPython, teraz połączymy czujnik PIR z ESP32. Tutaj będziemy używać Pin.IRQ_RISING mode w kodzie MicroPython dla czujnika PIR, ponieważ chcemy wyzwolić diodę LED za każdym razem, gdy czujnik PIR wykryje jakiś ruch. Ta dioda LED pozostanie WŁĄCZONA przez określony czas, a następnie WYŁĄCZY się.
Wymagane będą następujące komponenty:
- Płytka rozwojowa ESP32
- Czujnik ruchu PIR (HC-SR501)
- Rezystor 220 omów
- Przewody rozruchowe
- deska do krojenia chleba
- DOPROWADZIŁO
Schematyczny dla czujnika PIR z ESP32:
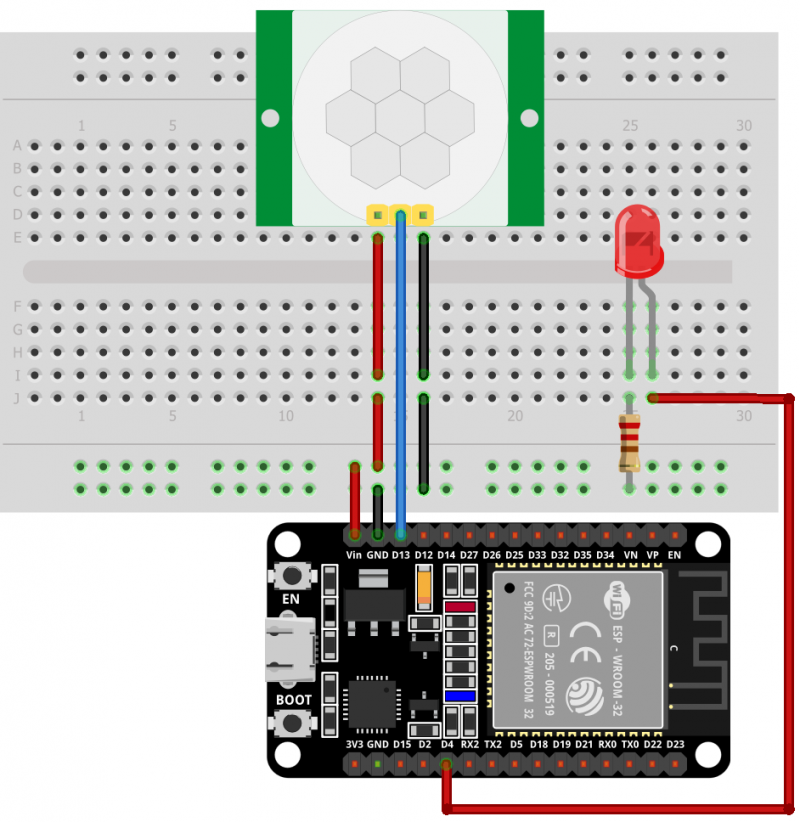
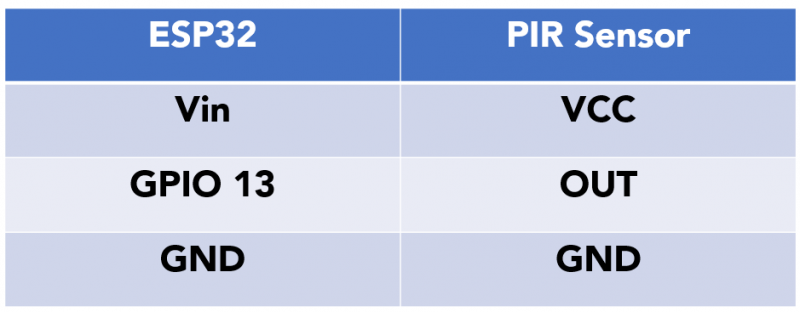
Konfiguracja pinów ESP32 z czujnikiem PIR to:
3.1: Czujnik ruchu PIR (HC-SR501)
PIR to skrót od Pasywne czujniki podczerwieni . Dwa czujniki piroelektryczne używane razem, które wykryją ilość ciepła wokół otoczenia. Oba te czujniki piroelektryczne leżą jeden za drugim, a gdy obiekt znajdzie się w ich zasięgu, zmiana energii cieplnej lub różnica sygnałów między tymi dwoma czujnikami powoduje, że sygnał wyjściowy czujnika PIR jest NISKI. Gdy pin wyjściowy PIR przejdzie w stan NISKI, możemy ustawić określoną instrukcję do wykonania (miganie diody LED).
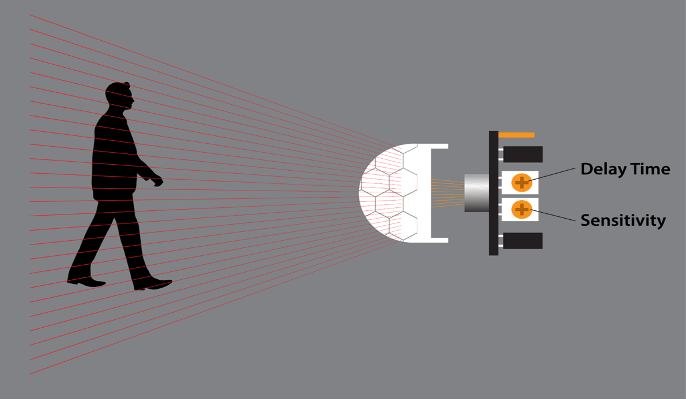
Poniżej przedstawiono charakterystykę czujnika PIR:
- Czułość można ustawić w zależności od lokalizacji projektu (np. wykrywanie ruchu myszy lub liścia)
- Czujnik PIR można ustawić na czas wykrywania obiektu
- Szeroko stosowany w alarmach bezpieczeństwa w domu i innych aplikacjach do wykrywania ruchu opartych na termice.
3.2: Układ pinów HC-SR501
PIR HC-SR501 jest dostarczany z trzema pinami. Dwa z nich to piny zasilania dla Vcc i GND, a jeden to pin wyjściowy dla sygnału wyzwalającego.
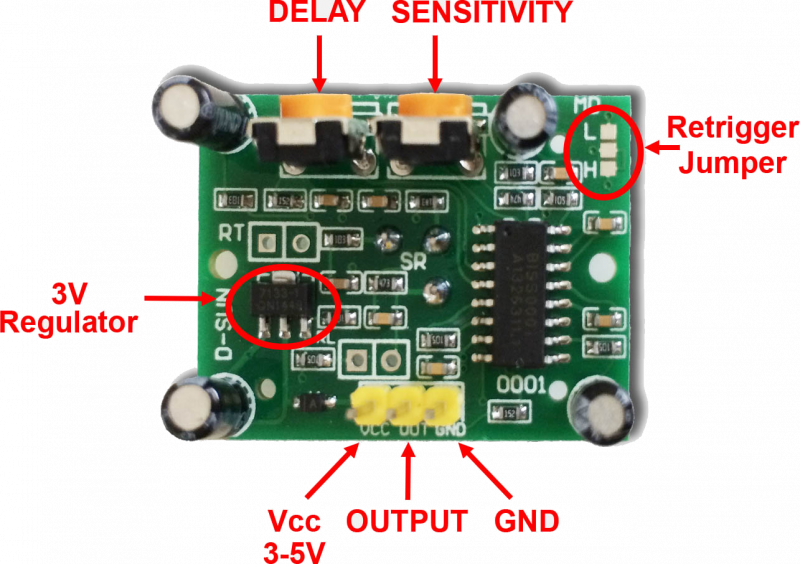
Poniżej znajduje się opis pinów czujnika PIR:
| Szpilka | Nazwa | Opis |
| 1 | Vcc | Pin wejściowy dla czujnika Podłącz do ESP32 Pin Pin |
| dwa | NA ZEWNĄTRZ | Wyjście czujnika |
| 3 | GND | Masa czujnika |
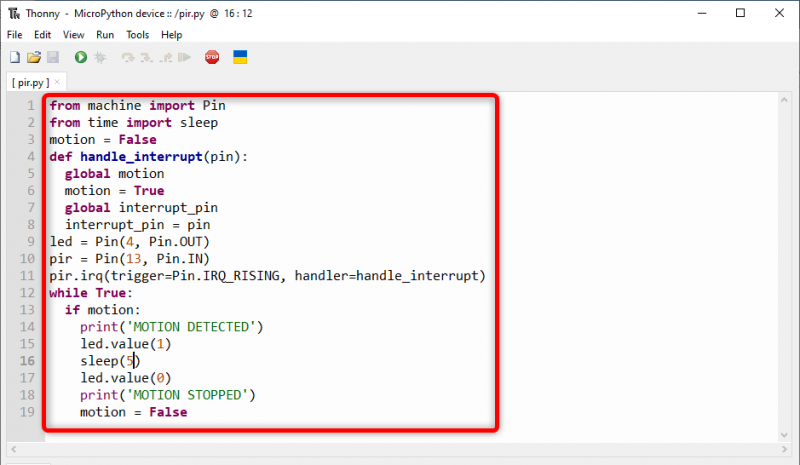
Teraz, aby zaprogramować ESP32, napisz podany kod w edytorze Thonny IDE lub innym MicroPython IDE i prześlij go do ESP32.
z importu maszyny Pinz czas importować sen
ruch = Fałszywy
zdecydowanie handle_interrupt ( szpilka ) :
globalny ruch
ruch = Prawdziwe
globalny pin przerwania
pin_przerwania = szpilka
doprowadziło = Szpilka ( 4 , Szpilka. NA ZEWNĄTRZ )
most = Szpilka ( 13 , Szpilka. W )
most. Irq ( cyngiel = Szpilka. IRQ_RISING , treser = uchwyt_przerwanie )
podczas gdy Prawdziwe :
jeśli ruch :
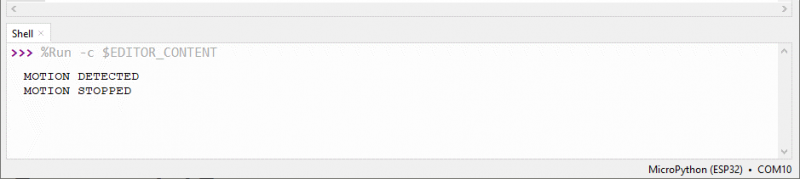
wydrukować ( „WYKRYTO RUCH” )
doprowadziło. wartość ( 1 )
spać ( 5 )
doprowadziło. wartość ( 0 )
wydrukować ( „RUCH ZATRZYMANY” )
ruch = Fałszywy
Najpierw importowaliśmy tzw szpilka class z modułu maszyny i spać metoda dodawania opóźnienia. Następnie tworzona jest zmienna o nazwie ruch. Ta zmienna wykryje, czy ruch został wykryty, czy nie.
Następnie stworzyliśmy funkcję uchwyt_przerwanie. Za każdym razem, gdy czujnik PIR wykryje ruch, funkcja ta zostanie aktywowana. Przyjmuje pin jako parametr wejściowy i wskazuje pin, który powoduje przerwanie.
W prostych słowach za każdym razem, gdy PIR wykryje ruch, uchwyt_przerwanie ustawi zmienną motion na true i zapisze pin, który powoduje przerwanie. Jedna rzecz do zapamiętania zawsze deklaruje ruch zmienną jako globalną, ponieważ jest potrzebna w całym kodzie.
Idąc dalej, stworzyliśmy dwa obiekty typu pin, jeden do przechowywania pinów LED, a drugi do wyjścia czujnika PIR na pin 13 GPIO. Następnie zadeklarowaliśmy pin wyzwalający w ROSNĄCY tryb.
w pętla część kodu, sprawdzi wartość zmiennej ruchu, gdy stanie się prawdziwa, dioda LED włączy się podłączona do styku 4 ESP32. Jeśli ruch zostanie zatrzymany, dioda LED wyłączy się po 5 sekundach.
3.4: Wyjście
W sekcji wyjściowej widzimy, że obiekt jest poza zasięgiem czujnika PIR, więc DOPROWADZIŁO jest zmieniony WYŁĄCZONY .
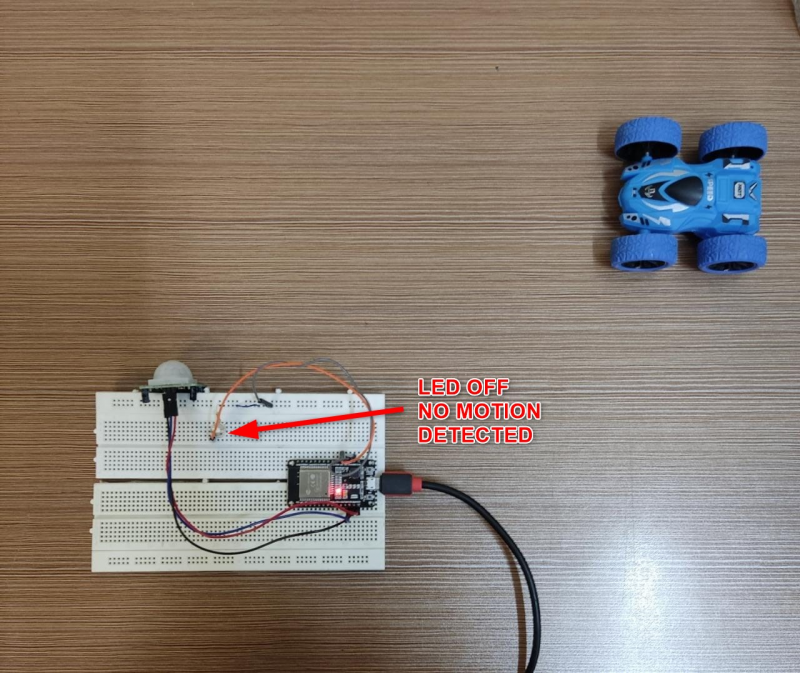
Teraz ruch wykryty przez czujnik PIR LED zacznie się obracać NA dla 5 sek po tym, jeśli nie zostanie wykryty żaden ruch, pozostanie WYŁĄCZONY aż do odebrania następnego wyzwalacza.
Następujące dane wyjściowe są pokazane przez powłoka/terminal w Thonny IDE.
Wniosek
Czujnik PIR z ESP32 może pomóc wykryć ruch różnych rzeczy. Korzystając z funkcji przerwania w MicroPythonie z ESP32, możemy wywołać odpowiedź na określonym pinie GPIO. Po wykryciu zmiany zostanie uruchomiona funkcja przerwania i zaświeci się dioda LED.